Rezolvarea CND de formă oarecare
Rezolvarea CND de formă oarecare
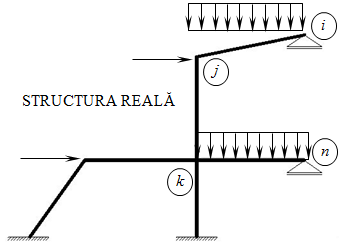
Se consideră CND de formă oarecare din figura de mai jos. Acesta are trei noduri rigide și două grade de libertate elastică. Sistemul de Bază se obține prin blocarea nodurilor la rotire de nod și prin blocarea translațiilor celor două grade de libertate elastică. Numărul necunoscutelor este egal cu 5 (3 rotiri de noduri + 2 translații GLE).
Acțiunile care se manifestă asupra Sistemului de Bază sunt:
1. necunoscutele rotiri de noduri Z1,Z2, … , ZP;
2. necunoscutele translații de noduri Zq… Zn;
3. forțele exterioare.
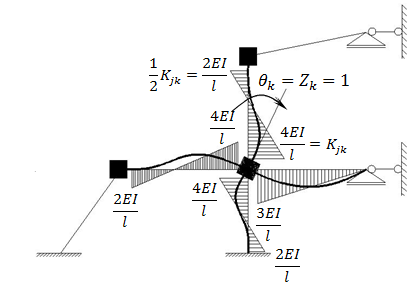
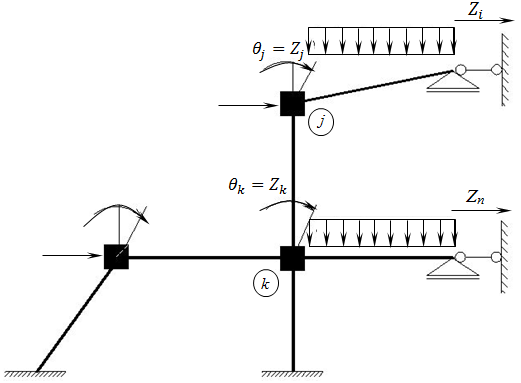
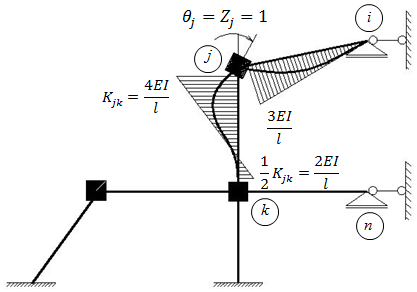
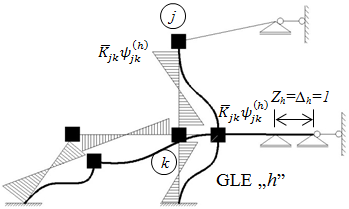
Se încarcă Sistemul de Bază cu rotirile de noduri θj=Zj=1 respectiv cu θk=Zk=1 (vezi figurile anterioare). Prin încărcarea Sistemului de Bază cu θj=Zj=1, în blocajele de nod se dezvoltă reacțiuni de moment (rjj,rkj) iar în blocajele de grade de libertate reacțiuni forță (rij,rnj). De asemenea pentru încărcarea cu rotirea de nod θk=Zk=1, în blocajele de nod se dezvoltă reacțiuni moment (rjk,rnk). Din rotire de nod pozitivă, toate momentele de la extremitățile barelor au rezultat pozitive.
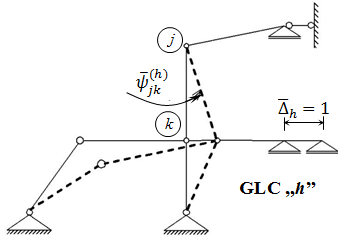
În figura următoare este prezentată încărcarea Sistemului de Bază cu translațiile GLE, respectiv cu Zi=∆i=1 și Zh=∆h=1.
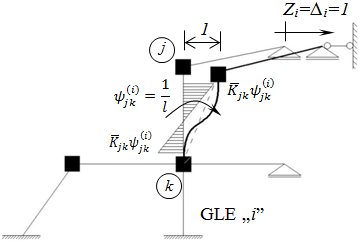
Observație: La rotiri pozitive ale axelor barelor corespund momente negative iar la rotiri negative ale axelor barelor corespund momente pozitive.
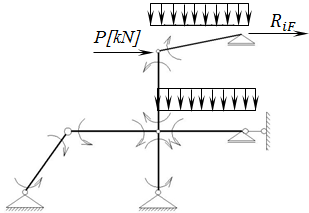
Încărcarea Sistemului de Bază cu forțele exterioare este dată în figura de mai sus. În blocajele nodurilor se dezvoltă reacțiunile moment RjF și RkF, iar în blocajele GLE se dezvoltă reacțiunile forță RiF și RhF.
Sistemul ecuațiilor de condiție al CND de formă oarecare este [r]{Z}+{RF}={0} și conține atât ecuații de nod cât și ecuații de grad de libertate.
Ecuații de nod (Rj=0)
Forma generală a ecuației de nod este :
![]()
Această ecuație exprimă faptul că reacțiunea moment totală din blocajul nodului „j” din încărcarea simultană a Sistemului de Bază cu rotirile de noduri, gradele de libertate elastică și forțele exterioare este egală cu zero. În acest mod se revine la situația structurii reale care nu are nodul „j” blocat la rotire de nod. În ecuația de nod anterioară coeficienții necunoscutelor și termenul liber au aceeași semnificație și expresiile următoare:
![]()
![]()
Primul indice al fiecărei reacțiuni moment precizează locul unde se înregistrează efectul, iar cel de-al doilea indice precizează cauza.
Ecuații de grad de libertate (Ri=0)
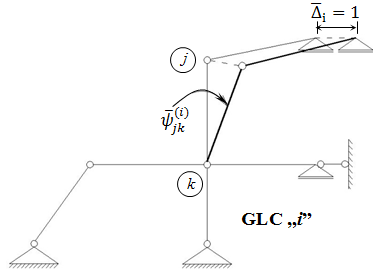
La scrierea ecuațiilor de grade de libertate se va folosi principiul lucrului mecanic virtual. În acest scop se transformă structura într-un mecanism eliberând în toate nodurile, respectiv în toate rezemele încastrate legăturile corespunzătoare momentelor. Se obține astfel un mecanism cu două grade de libertate cinematică (GLC „i” și GLC „h”) acționat de momentele finale „M” de la extremitățile barelor, de forțele exterioare „Fext” care acționează asupra structurii și de reacțiunile „R” din blocajele gradelor de libertate.
Configurațiile deplasărilor cinematice în schema articulată vor fi în concordanță cu cele ale deplasărilor elastice impuse în Sistemul de Bază. Parametrii configurațiilor deplasărilor cinematice s-au notat ![]() .
.
Pentru același grad de libertate „i” deplasarea elastică zi=∆i=1 și deplasarea cinematică ∆i=1 au aceeași configurație în sensul că rotirile axelor barelor sunt aceleași ![]() .
.
Forma generală a ecuației de grad de libertate este :
![]()
Deoarece ecuația anterioară se obține prin deplasarea cinematică „i” toți coeficienții necunoscutelor și termenii liberi vor avea semnificația de lucru mecanic.
Observație: Un coeficient „rij” reprezintă lucrul mecanic virtual dat de momentele de capăt produse în Sistemul de Bază de încărcarea cu rotirea de nod θj=Zj=1 parcurgând deplasarea cinematică ∆i=1 (rij=Lij).
La notația „rij” primul indice se referă la deplasarea cinematică utilizată pentru exprimarea condiției de echilibru static, iar al doilea indice la deplasarea elastică prin care se încarcă Sistemul de Bază (rotiri de noduri sau GLE).
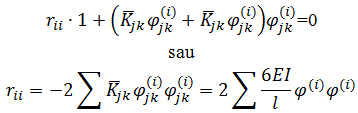
Se poate scrie: ![]() sau
sau ![]() .
.
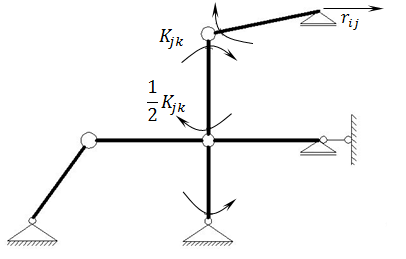
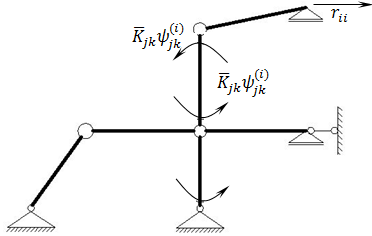
Un coeficient „rii” reprezintă lucru mecanic virtual dat de momentele de capăt produse în Sistemul de Bază de încărcarea cu GLE ∆i=Zi=1 parcurgând deplasarea cinematică ∆ ̅i=1 (rii=Lii). Avem :
În mod analog, „rih” va avea expresia :
![]()
Un coeficient „RiF” provine din acțiunea forțelor exterioare asupra Sistemului de Bază. Pe barele „jk” ale acestuia apar momentele de încastrare perfectă mjk şi mkj. Dând deplasarea cinematică ∆ ̅i=1, atât aceste momente cât și forțele aplicate produc lucru mecanic virtual. Se poate scrie:
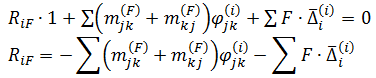
unde suma se referă la barele care se rotesc în deplasarea cinematică „i”.
Observație: S-au evaluat astfel toți coeficienții necunoscutelor și termenul liber din ecuația de grad de libertate. Se rezolvă sistemul ecuațiilor de condiție format din ecuațiile de nod și de grad de libertate și se obțin valorile necunoscutelor Z1, Z2 ..., Zj, Zk, ... Zh, Zi, ..., Zn.
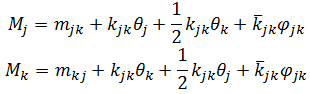
Momentele finale de la extremitățile barelor se obțin cu relațiile următoare:
Bara dublu încastrată „jk”
Bara încastrat articulată „jk”
![]()
Verificarea diagramei de momente se realizează prin intermediul lucrului mecanic virtual:
![]()
Lucrul mecanic virtual dat de momentele finale de la extremitățile barelor și al forțelor exterioare aplicate pe structură pentru fiecare deplasare cinematică „i” trebuie să fie egal cu zero.
Discută acest articol pe forum. Nici un comentariu.
Lasă un comentariu